Peer-to-Peer Self-Regulating Traffic
No More Speed Cameras!
AAs the title suggests, this is a proposal for traffic to regulate itself.
It’s a very simple concept, an offshoot of the colllsion avoidance technologies now rolling out.
Each car - maybe integrated as part of an assisted driving technology - would have an array of 4 sensors and 2 cameras (fitted as invisibly as possible - maybe an augmentation of the LIDAR system or parking sensors):
One sensor in each of its four corners for monitoring the speed of cars around it and a camera on each side at the front.
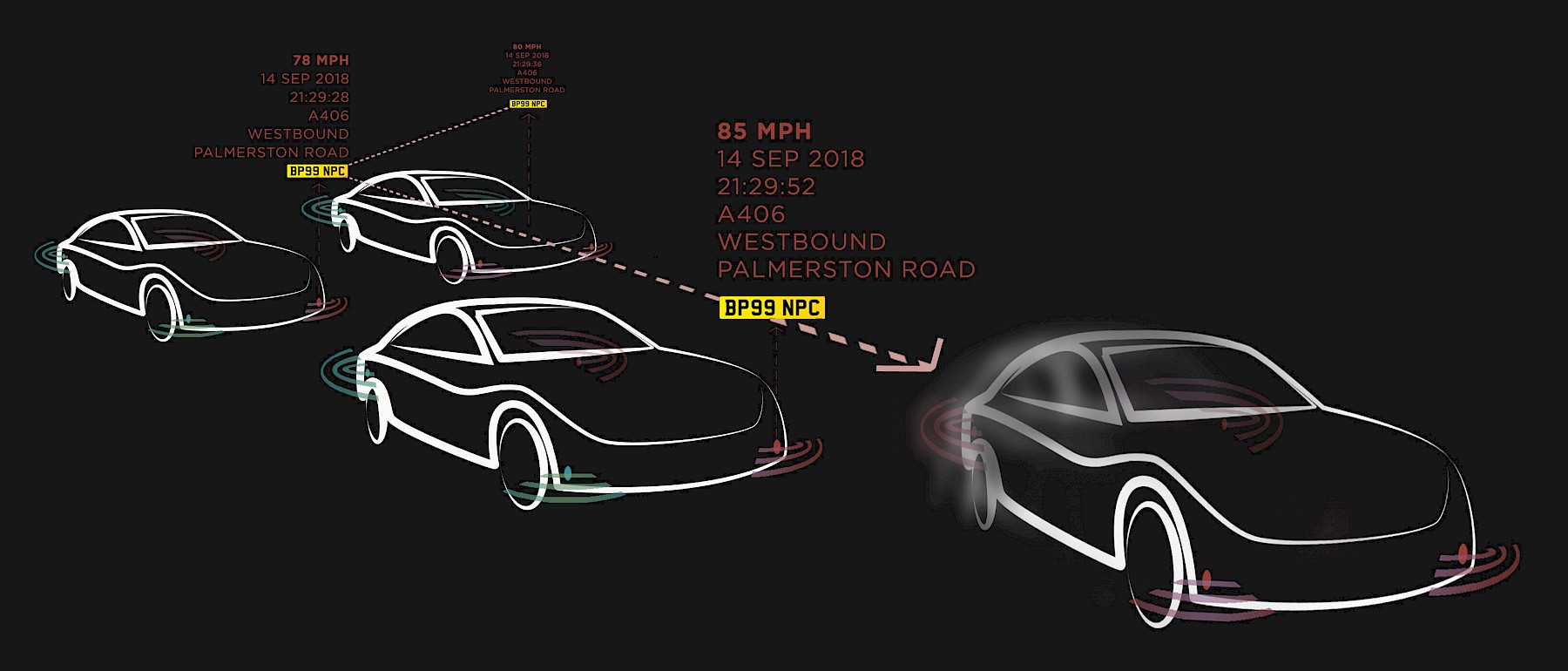
It is a system completely independent from the driver and on-board car systems with no access, so there should be no concerns about privacy. Its purpose is simply to flag any dangerous or illegal driving behaviour around it and send the speed, location, time and a photo of the number plate to the traffic authority.
Simply put, the rear sensor would clock the liklihood of an infraction, the front sensor would be able to judge the speed from the time it takes the offending car to get from the rear sensor to the front sensor, bearing in mind your own speed, and then take a picture of the offending numberplate as it hurtles away.
When a specific car is flagged, say 5 times within a set time period of 2 minutes from different cars, an automatic penalty notice would be issued to the owner. But this could be modified : for repeat offenders you could reduce the number of minutes or infractions before issuing a penalty. For first time offenders, you could allow more time or instances.
When every car on the road is potentially a speed camera, dangerous behaviours would be minimised without any further infrastructure investments almost by default. It would be as much a deterrent as an enforcer. Even introducing the idea of this system could help as it would be hard to tell which cars had the system fitted and which didn’t.
For peace of mind, it could be regulated to be a one-way system - data would flow from car to authority only - and only then if the car spotted dangerous driving around it. It couldn’t be ‘hacked’ as the data would only flow one way.
The benefits are multifold. Dangerous driving is discouraged by those who would be most at risk as they are the ones monitoring. There is no input by the driver in any way - it is all automatic and invisible so there is no chance of bias.
The system would make drivers safer around other drivers - which is where they actually need to be safer drivers - rather than only when they see a speed camera.
Closer proximity and multiple confirmations of infractions gives more reliable and detailed information and context than speed cameras. This makes drivers safer around other drivers - which is where they actually need to be safer drivers - rather than only when they see a speed camera or a police car.
It would also flag other dangerous behaviours in addition to excessive speed : weaving through traffic, undertaking, etc. and could be used when required for accident investigations.
There would be less infrastructure and cost for local authorities as it is designed to be self-maintaining - through the MOT for example - and would be robust: as each car’s data would be compared to others around it, miscalibrations could be ignored making the system virtuially error-proof. In heavily built-up areas with many parked cars, the system could still work either via the cars parked along the street (because it would be an independent system to the rest of the car so woudn't drain the main battery - it would be 'asleep' until triggered by a certain detected speed around it), or it could be installed in street lights.
There are a myriad of ways in which the parameters for triggering could be configured as part of regulation - certain times of day and not others, certain areas and not others, to be deternined maybe as part of a public consultation.
Newer cars could have the sensors and cameras already built in but they could potentially be retrofitted on older models. The key concept here is that the control of traffic happens where it is most needed - around other road users rather than specific known locations, and it would never require outside maintenance - to make the roadways a safer environment for all.